Wat heb ik gedaan?
Om alvast grip te krijgen op het Line tracking proces ben ik begonnen met het opstellen van een spuugmodelletje. Op I-prototype heb ik een robot basis gekocht, die op hetzelfde voortbewegings-principe werkt als de robot "Tommy". Ook heb ik mijn proto H-brug gebruikt als aansturing voor dit systeem.
 |
| Prototype van de H-brug |
 |
| Proto type van de H-brug |
 |
| Voertuig proto-type lijn volger. |
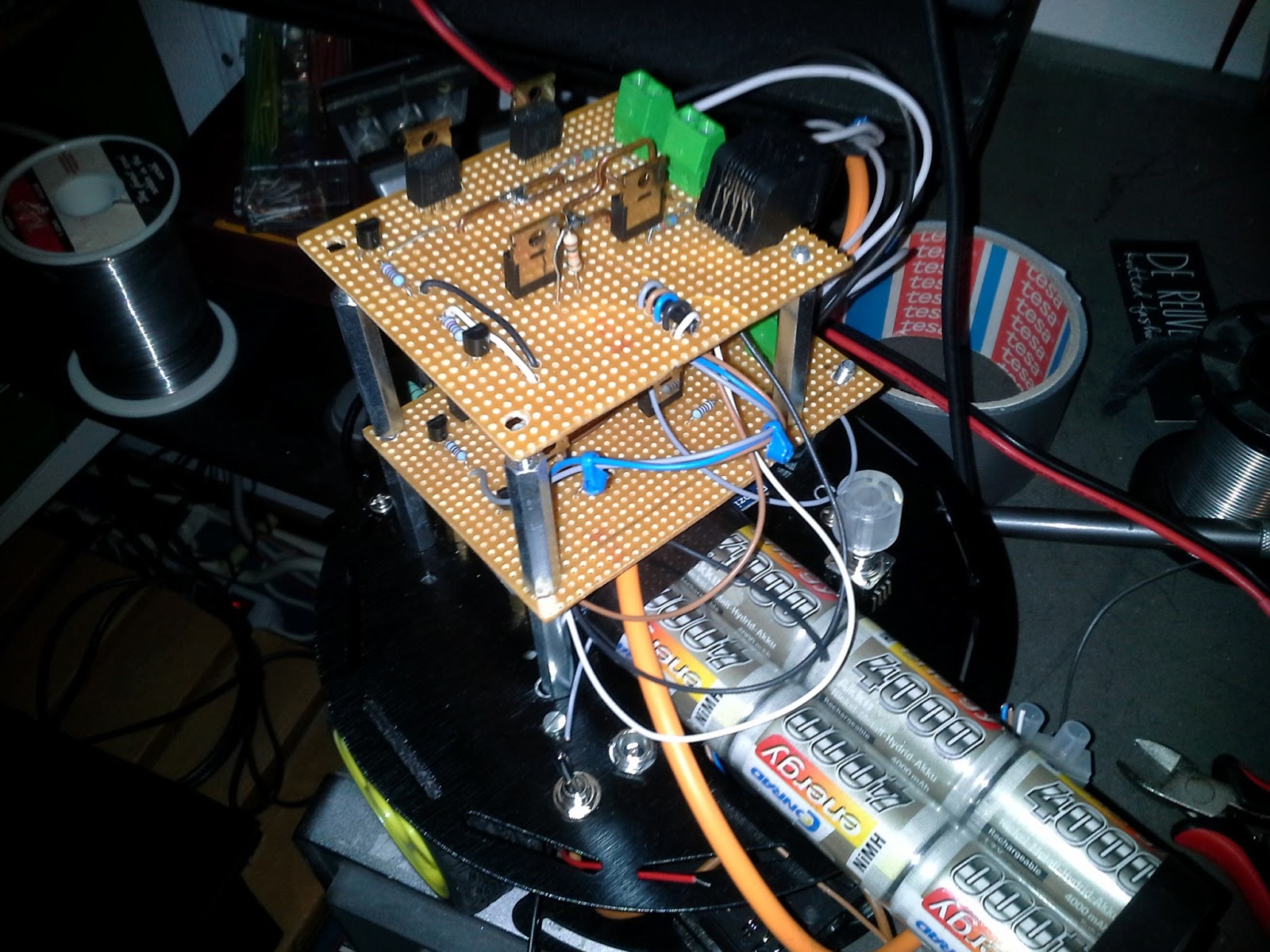 |
| Voertuig proto-type lijn volger |
Resultaat.
Hieronder een drietal filmpje die het resultaat laten zijn van de door mij ontwikkelde proto-type lijn volger.
Wat heb ik er van geleerd?
- Van dit stukje onderzoek heb ik geleerd, hoe ik een proces kan inschatten van hoe systeem reageert op zijn sensoren.
- Door het opstellen van een spuugmodelletje kan ik snel onderzoeken of mijn programma goed/voldoende functioneert.
Wat kan ik verbeteren?
- Ik moet mijn resultaten beter archiveren, onderzoek resultaten beter opschrijven etc.
Geen opmerkingen:
Een reactie posten