De aansturing van team Alfred ontworpen, het probleem was dat zij geen rekeningen houden met het vermogen van de motoren. Ik heb gevraagd naar de eisen van hun rij snelheid en de tijd die voor het optrekken staat. De acceleratie tijd was twee seconden.
De eisen en wensen heb ik ingevuld in mijn simulatie model van energie opslag en transport. Ook heb ik de parameters ingevuld die ik heb gekregen van de makers van de robot Alfred.
Hieronder zie u de resultaten die ik heb behaald.
Resultaat
Tabel
 |
| grenswaardes van de robot Alfred bepalen |
 |
| Grafiek die de stroom door de motor weer geeft. |
 |
| De kracht die nodig is tijdens het accelereren. |
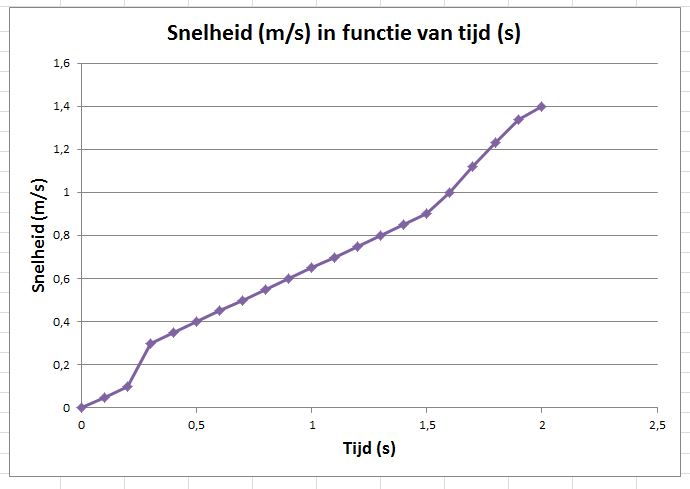 |
| De acceleratie kromme tijdens het accelereren. |
 |
| Aansturing E-schema van de robot "Alfred" |
* Let op de mosfet's, opamps en vrijloop diodes zijn niet de onderdelen die ik heb toegepast. De onderdelen licht ik toe in het kopje onderdeel keuzes.
Onderdeel keuzes.
Ik heb mijn keuzes van de onderdelen gebaseerd op de onderzoeksresultaten, hieronder laat ik nog een opsomming zien van de resultaten.
- Het maximale vermogen dat opgenomen wordt door de motoren, ligt ongeveer bij de 200 Watt.
- De maximale stroom die door de motoren vloeit ligt rond de 19 A. Deze stroom loopt er maximaal maar een aantal tiende secondes. Dit heeft te maken met het aanloopkoppel.
Door rekening te houden met deze twee resultaten kan ik, de mosfet gaan bepalen. Er zijn natuurlijk mosfets te koop van 6 euro die dit makkelijk kunnen schakelen. Maar als je goed doorzoek kom je mosfets die 3 euro kosten en dit vermogen kunnen schakelen. Zo bespaar je wel 3 euro per mosfet. Dus als er duizend robots gebouwd worden bespaar je je hiermee wel 3000 euro.
Mosfet keuze is uit gegaan naar,
IRFP 460 N. (URL link, mosfet), deze mosfet voldoet aan de eisen en wensen van de klant.
Opamp keuze is uitgegaan naar,
Vrijloop diode keuze is uitgegaan naar,
Ik heb gekozen om een schotty Diode (URL link, Schotty Diode) toe te passen, want deze schotty diodes hebben een snel schakel gedrag. waardoor de stroom snel kan weg vloeien.
kostprijs schakeling,
€ 12 euro.
Test filmpje
foto's
 |
| Besturing kastje "Alfred" |
 |
| Besturing kastje "Alfred" |
 |
| Besturing kastje "Alfred" |
Wat heb ik er van geleerd?
- Door ervaring op te doen met het excel simulatie programma, kan ik ook voor andere projecten snel en handig gebruik maken van die bestand. Want deze schakeling heb ik op een donderdag avond ontworpen en gebouwd. En mede dankzij het simulatie programma heb ik de onderdelen kunnen kiezen en beargumenteren waarom ik deze onderdelen heb gekozen.
Geen opmerkingen:
Een reactie posten